Gravitational-Wave Lensing
My lensing work connects targeted searches for subthreshold counterparts with repeated-signal localization for multimessenger follow-up.
Strong lensing can split one source into multiple gravitational-wave images that arrive at different times and with different amplitudes. The brighter image is usually the one that first triggers a search, but the later images can sit below threshold. My work asks how to recover those weaker counterparts without turning the search into an all-sky brute-force scan.
The story starts with TESLA. The method uses a known event to narrow the parameter space for a later lensed image, so the search is focused on the most plausible region rather than the full bank. That makes the method practical enough to use inside a collaboration pipeline.
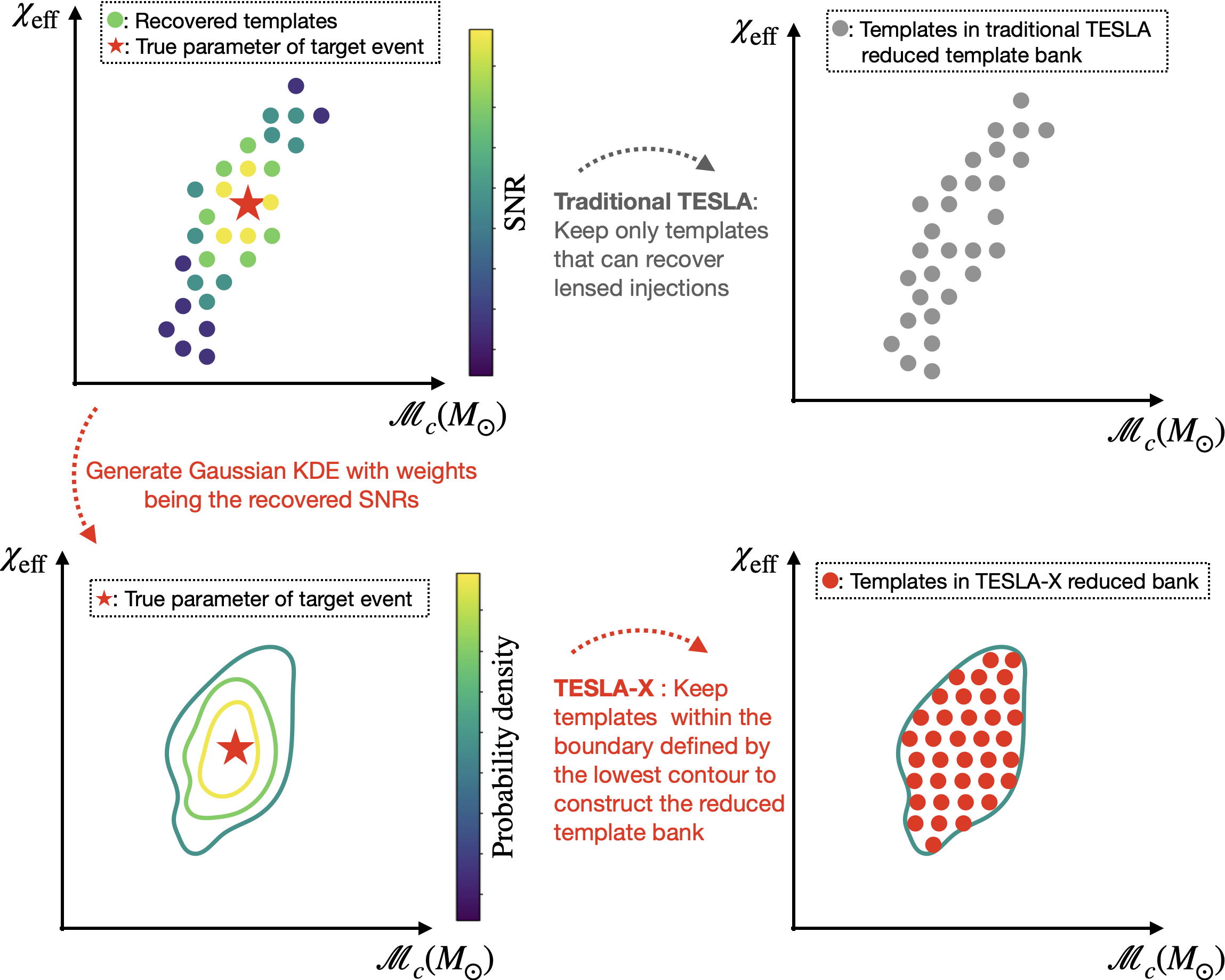
TESLA-X extends the idea. Instead of only reducing the bank around the first event, it builds a targeted population model from lensed injections and uses that model to define a bank that is better matched to the subthreshold problem. The gain is not generic discovery power. It is a better chance of recovering the sort of faint, physically consistent image that a standard broad search would miss.
TESLA
TESLA uses a reduced bank centered on the target event, then ranks candidate subthreshold images against the background. The point is to preserve sensitivity to the right part of parameter space while keeping the search manageable for LVK analysis workflows.
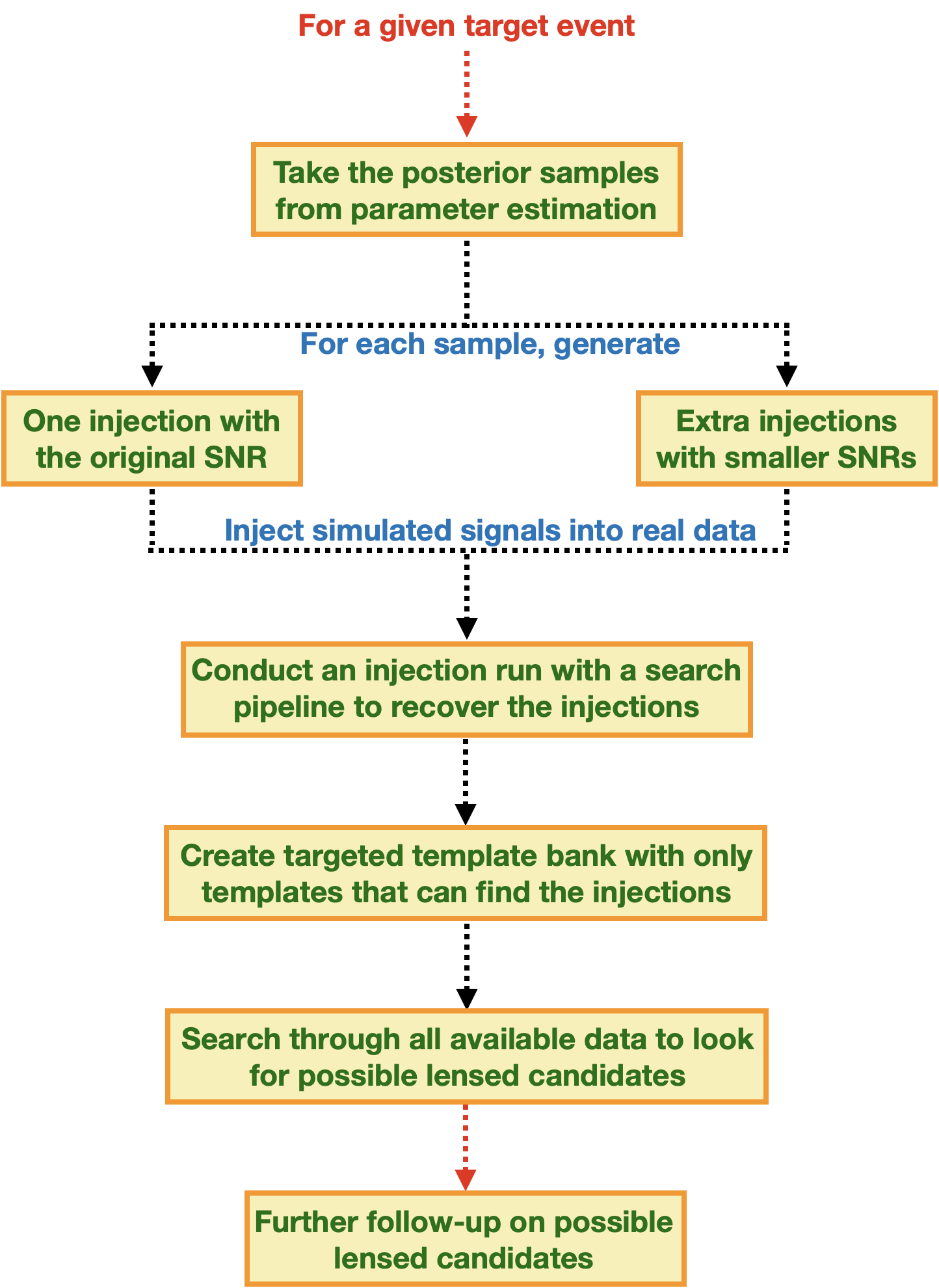
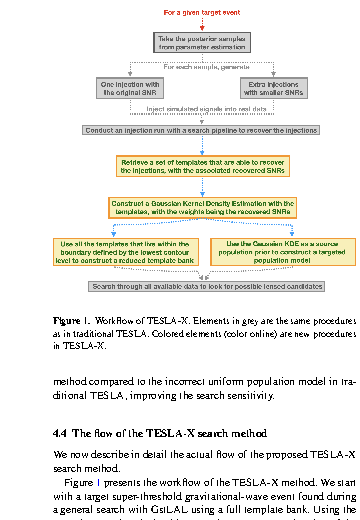
The first TESLA figure lays out the workflow: start from a target event, generate simulated injections around it, run the search, and keep only templates that can recover the injections. The reduced bank is the key step because it turns an otherwise broad search into a targeted one.
TESLA-X
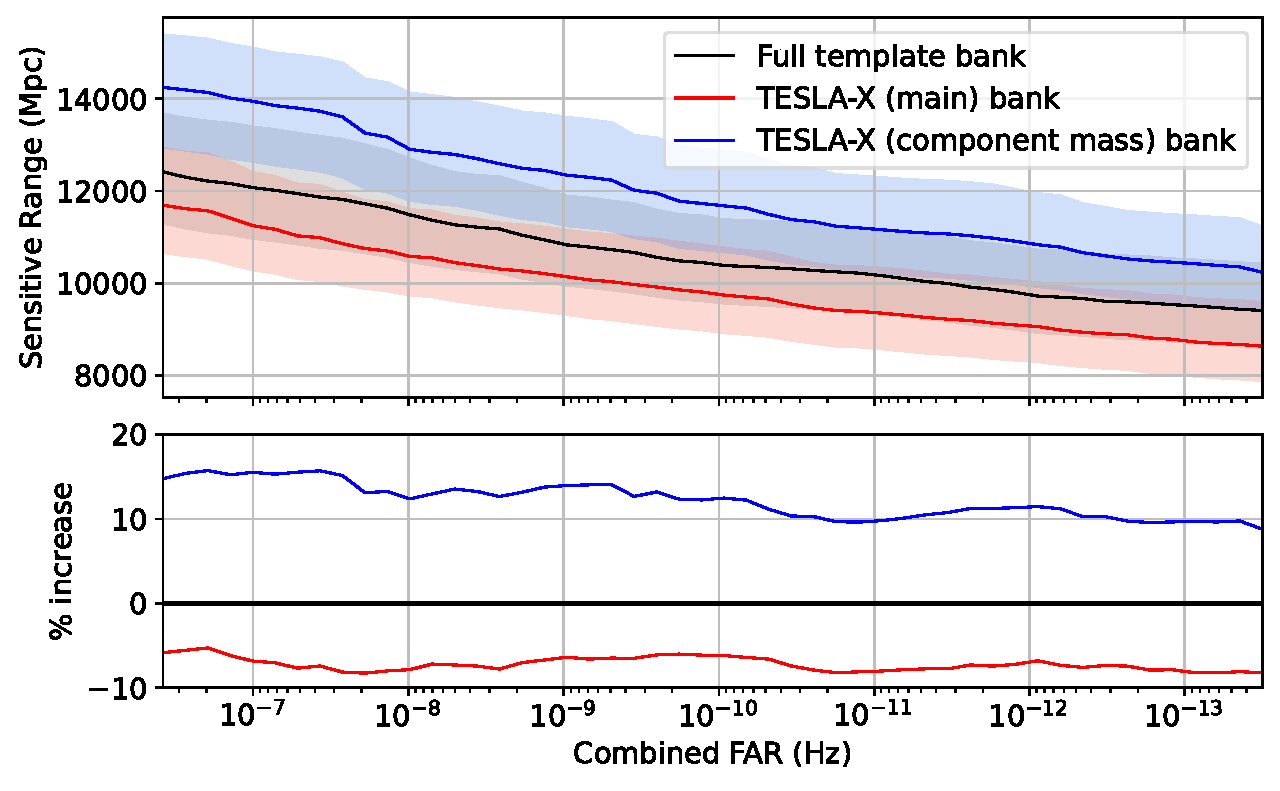
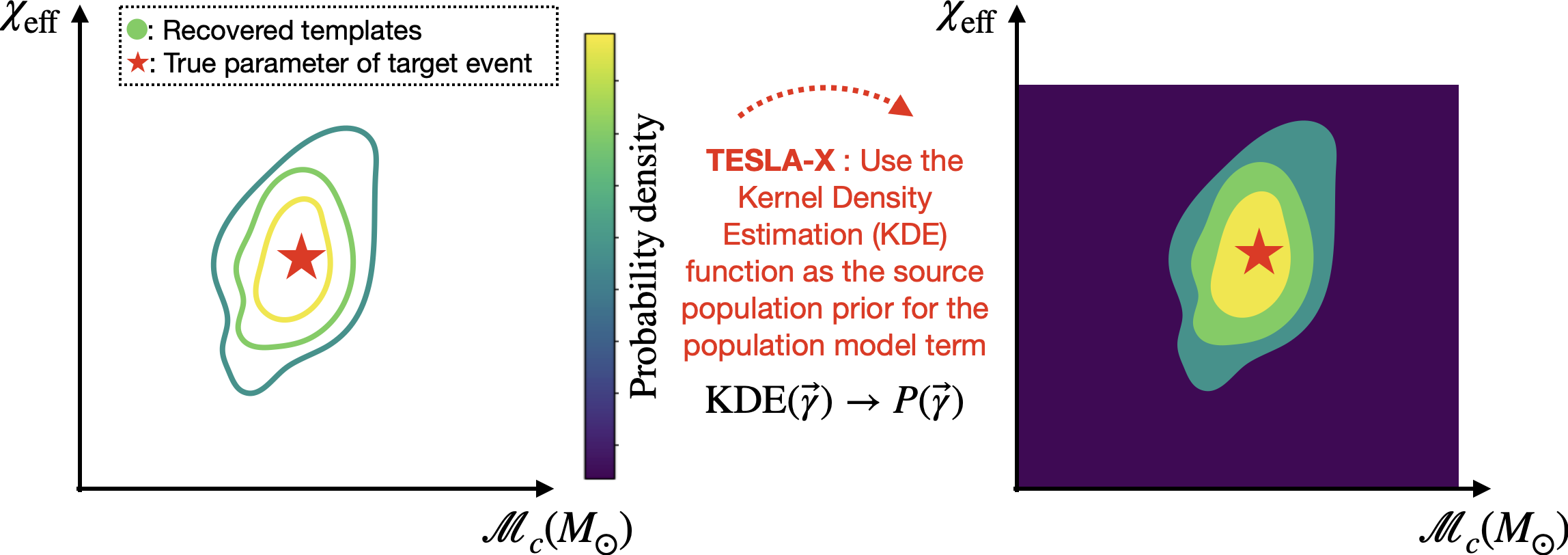
TESLA-X uses the same basic logic, but it goes one step further by turning the lensed injections into a source-population model. That gives the reduced bank a better physical shape and makes it more representative of the weak-image problem we actually care about.
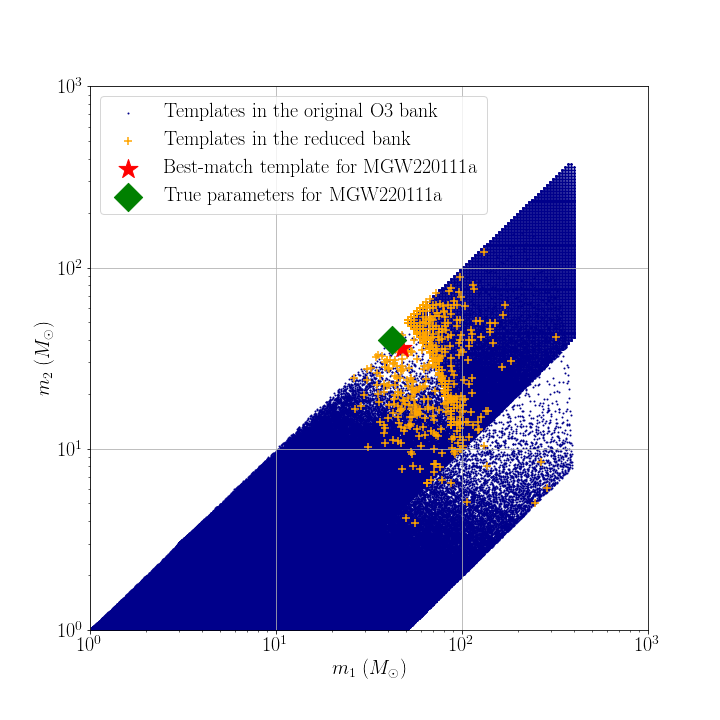
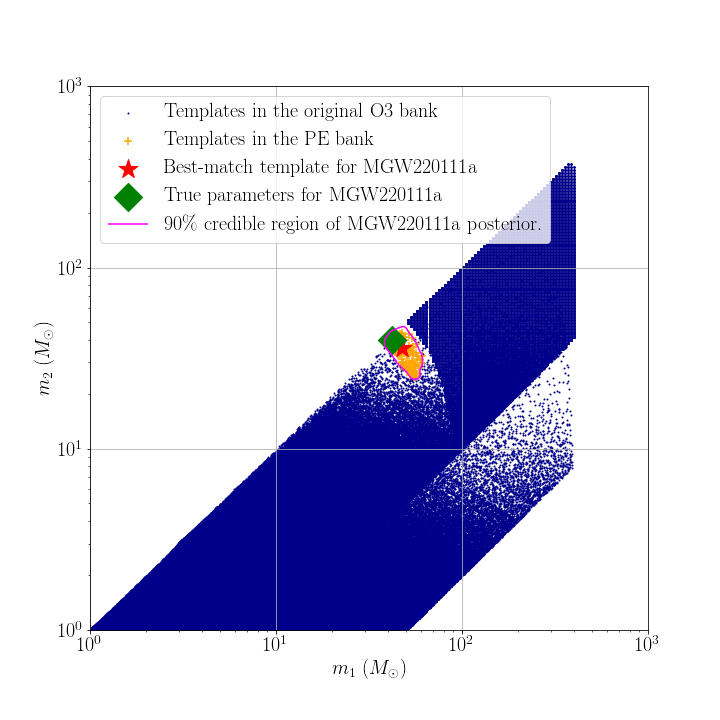
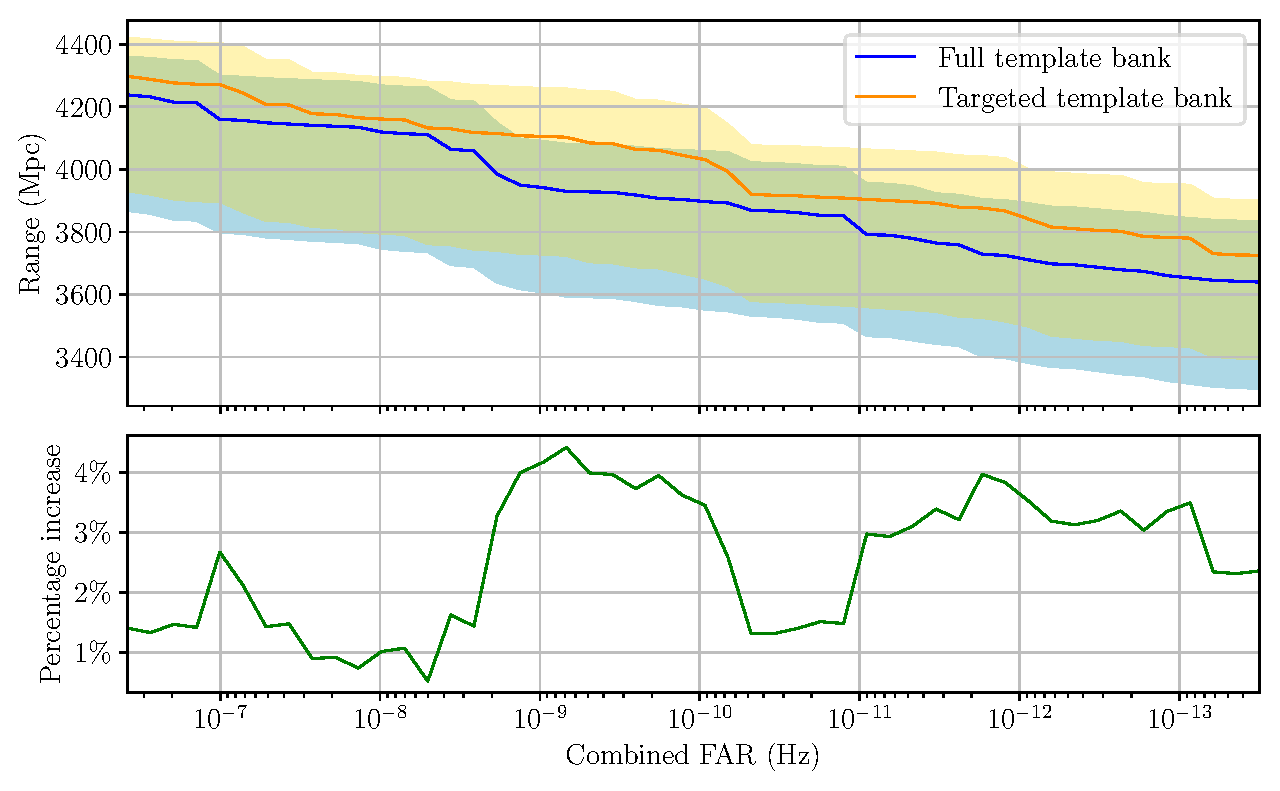
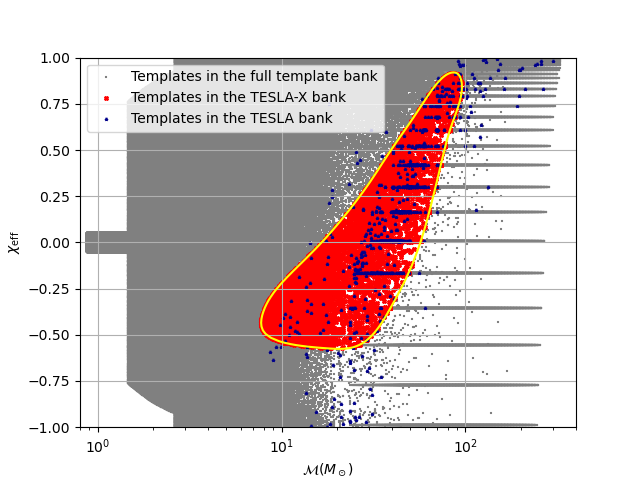
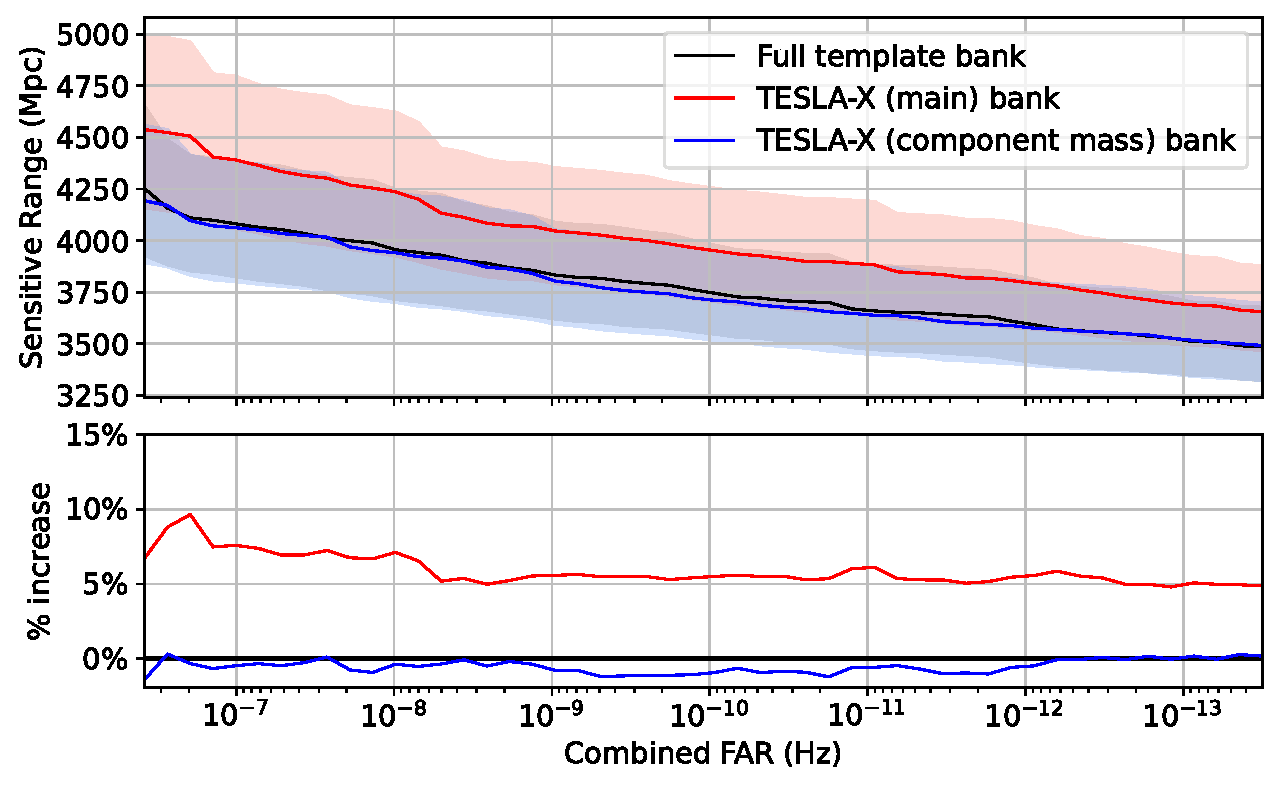
The TESLA-X slides show the progression from cartoon to implementation: a reduced bank, the workflow, the template-bank comparison, and the sensitivity plots. Together they show why the method is better matched to subthreshold lensed signals than a generic template bank.
Localization for Lensed Follow-up
The other half of the lensing problem is localization. Once a weak lensed image is recovered, the event is only useful if the sky region is small enough for host-galaxy searches, lens-structure studies, and multi-messenger follow-up.
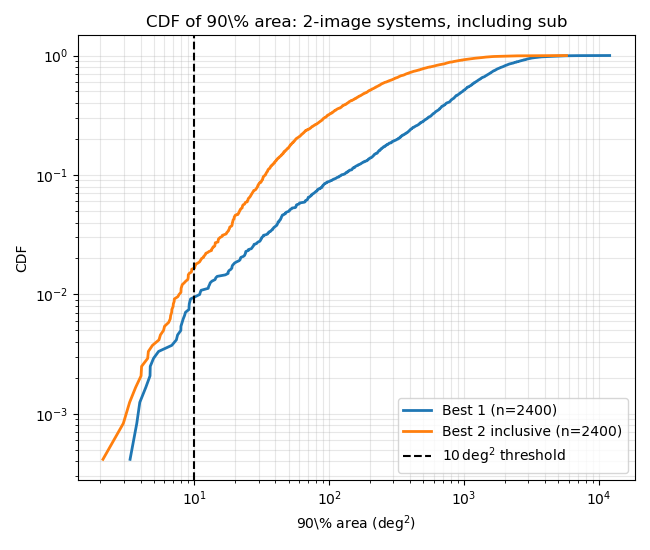
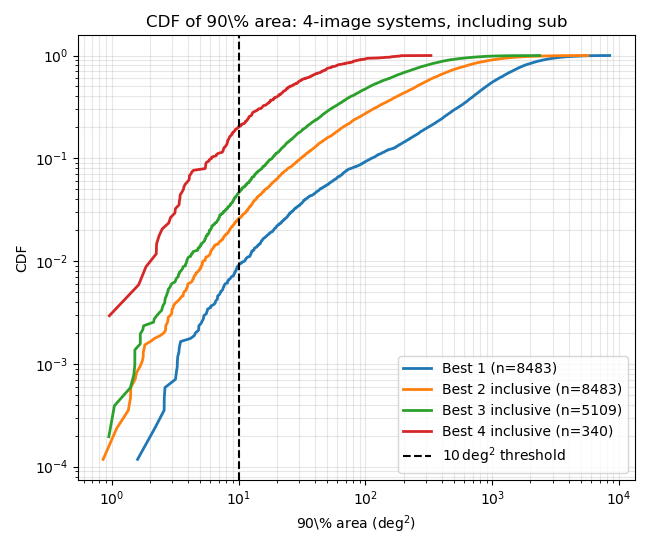
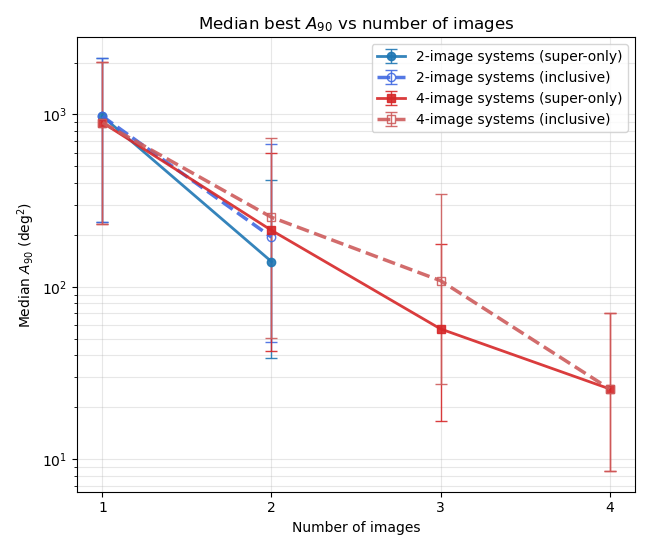
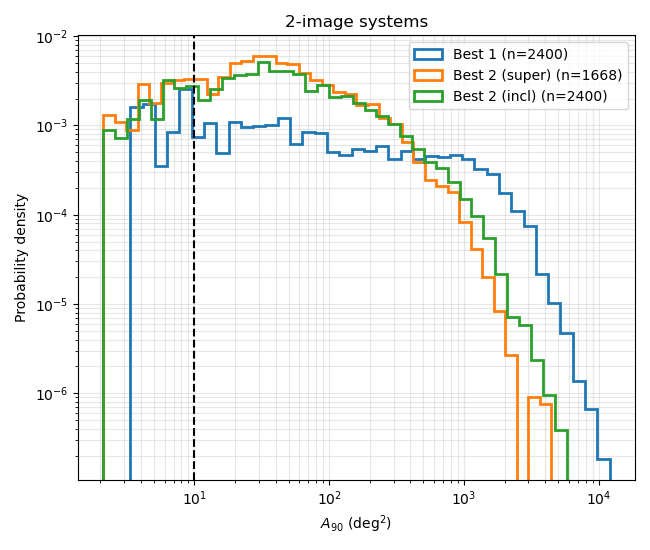
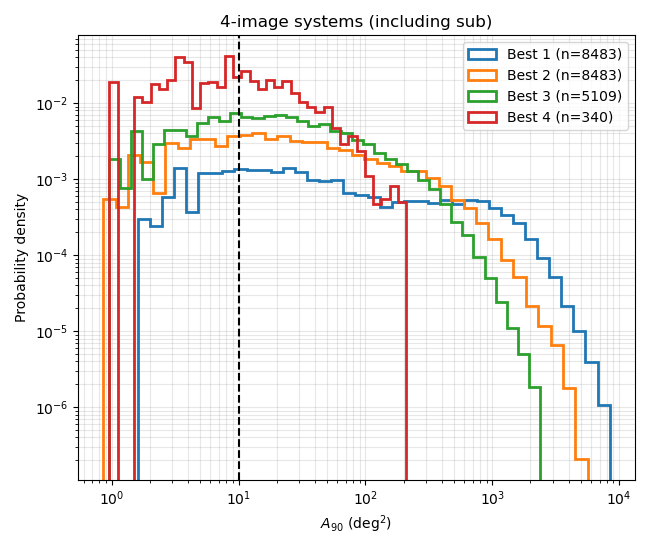
The lensing-localization paper in this directory studies exactly that problem. Using simulated strongly lensed compact binary coalescences and Bayestar sky maps, it finds that combining multiple lensed images improves localization monotonically. The largest gain comes from the second image: two-image systems typically improve by about an order of magnitude relative to the best single image, and subthreshold images can be included without degrading performance.
By four images, the typical localization area reaches the 10 to 100 deg2 range, which is the regime where host-galaxy association and targeted follow-up become realistic rather than aspirational. That is the relevant threshold for lensing work, not just an abstract improvement in sky map quality.
LVK Observing-Run Papers
My method development feeds into the LVK observing-run lensing papers that track the search from O3 to O4. The work moves from targeted subthreshold searches to collaboration-wide analysis and editorial responsibility.
O3a lensing paper
The O3a analysis established the collaboration-level search for gravitational-lensing signatures in the full third observing run. My targeted-search development work provided the methodological base for this line of analysis.
O3b and O4a lensing papers
I served as an analyst and editorial team member on the O3b and O4a lensing papers, contributing to the analysis workflow, validation, and paper preparation for the observing-run series.
O4b lensing paper
I am the editorial team chair for the O4b lensing paper, coordinating the writing process and helping steer the collaboration toward a consistent final analysis narrative.
Related Papers
- Search for gravitational lensing signatures in LIGO-Virgo binary black hole events
- Targeted Sub-threshold Search for Strongly-lensed Gravitational-wave Events
- Search for lensing signatures in the gravitational-wave observations from the first half of LIGO-Virgo's third observing run
- Search for gravitational-lensing signatures in the full third observing run of the LIGO-Virgo network
- Follow-up Analyses to the O3 LIGO-Virgo-KAGRA Lensing Searches
- TESLA-X: An effective method to search for sub-threshold lensed gravitational waves with a targeted population model
- A First Investigation of Repeated-Signal Localization of Strongly Lensed Gravitational Waves for Multimessenger Astronomy
- GWTC-4.0: Searches for Gravitational-Wave Lensing Signatures